
Robotic Degrees of Freedom: How Many Axes Does Your Robot Really Need?
A clear explanation of robotic degrees of freedom covering how axes work, which axis count fits which job, external axes, how FANUC, ABB, KUKA, and Yaskawa design for flexibility, and what to check on used robot joints.
Tyche Robotic
6/18/20265 min read
Every axis on a robot is a choice. More axes mean more flexibility, more reach into tight spaces, and more ways to orient a tool. They also mean more cost, more complexity, and more joints that can wear. The number of axes a robot needs is not a matter of more being better. It is a matter of matching the machine to the job. A four-axis SCARA robot running pick-and-place on a flat surface does not need six axes, and adding them would slow it down and drive up the price. A six-axis articulated robot welding a curved seam on a structural part needs every degree of freedom it has, and a four-axis machine could not do the job at all. Understanding what degrees of freedom actually mean, how many the common robot types use, and where the wear accumulates on each axis is how a buyer picks the right machine and knows what to inspect when buying used.
What Are Degrees of Freedom and How Do They Work?
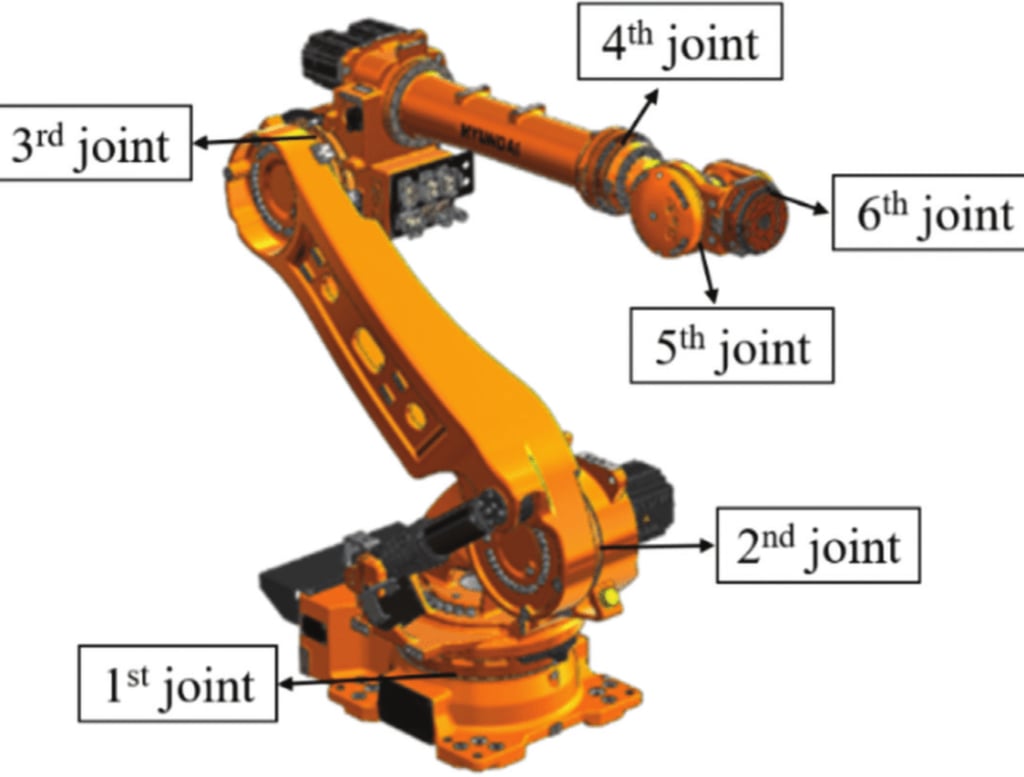
A degree of freedom is one independent direction of motion. On an industrial robot, each rotating joint provides one degree of freedom. The joint spins around its axis, and by combining the rotation of several joints, the robot can position its wrist at almost any point and angle within its work envelope. A six-axis articulated robot covers all six degrees of freedom that exist in three-dimensional space. Three axes handle position, moving the tool to the right X, Y, and Z coordinates. Three more axes handle orientation, roll, pitch, and yaw, tilting and rotating the tool so it approaches the part at the correct angle. Six axes is the minimum number needed to achieve any orientation at any reachable point. That is why the six-axis articulated arm became the universal standard in industrial robotics. It can weld, palletize, assemble, paint, and machine-tend without being reconfigured.
How Many Axes for What Job?
The number of axes a robot needs is determined by the geometry of the work. Four-axis robots, SCARA and Delta designs, move fast in a limited set of directions. A SCARA robot has three rotation axes and one linear axis, which makes it unbeatable for high-speed pick-and-place on a flat plane. The repeatability can reach one hundredth of a millimeter, and the cycle times are measured in fractions of a second. A Delta robot uses a parallel-link design with three or four axes and is even faster for lightweight sorting and packaging. These robots dominate electronics assembly and high-speed material handling where the part never needs to be tilted or reoriented in space.
Five-axis robots are less common and usually found in specific process applications like certain types of welding or dispensing where the part geometry requires an extra tilt axis but not the full orientation capability of a six-axis machine.
Six-axis robots are the universal tool. They can reach any point from any angle, which means they can weld a curved seam, palletize a mixed stack, or load a CNC machine through a side door. The payload range runs from a few kilograms to over a ton, and the repeatability runs from a few hundredths of a millimeter for precision assembly to a few tenths for heavy spot welding.
Seven-axis robots add a redundant joint, usually in the middle of the arm. This extra degree of freedom lets the robot snake around obstacles and work in confined spaces without repositioning its base. Collaborative robots like the KUKA LBR iiwa and the ABB YuMi use seven-axis designs for flexibility. The cost is higher, and the programming is more complex.
Beyond seven axes are specialized designs. Yaskawa's SDA series dual-arm robots have fifteen axes across two arms, and they handle assembly tasks that require two-handed coordination. These are niche machines built for specific problems.
External Axes: Tracks and Positioners
The degrees of freedom built into the robot arm are only part of the story. External axes add motion that extends what the robot can reach and how it can approach the work. A robot track, also called a seventh axis or RTU, mounts the robot on a motorized rail. The robot can travel along a long workpiece, service multiple machines in a row, or shuttle parts between stations. The track adds one linear degree of freedom, and the robot controller treats it as an additional axis that moves in coordination with the arm. A positioner adds rotational degrees of freedom by moving the part instead of the robot. A single-axis positioner spins the workpiece. A dual-axis positioner tilts and rotates it. When a robot welds on a positioner, the part turns while the torch stays in the optimal orientation. The robot and the positioner move together, and the combined degrees of freedom of the arm and the positioner determine the geometry that the cell can weld.
How the Big Four Design for Degrees of Freedom
The four major robot brands all build six-axis articulated robots as their core product, but the way they handle those degrees of freedom reflects different engineering priorities. FANUC designs for compactness and reliability. The LR Mate series packs six axes into a desktop-sized arm that holds repeatability at one hundredth of a millimeter. The M-1iA and M-2iA Delta robots use three and four-axis parallel-link designs for high-speed picking, and the hollow wrist on the Arc Mate series routes cables internally so the extra degrees of freedom do not create snagging hazards. ABB designs for motion control. The six axes on an IRB 1200 or IRB 1520ID are tuned to work with TrueMove and QuickMove, which keep the programmed path accurate and the cycle times short regardless of how many axes are moving simultaneously. The hollow wrist on the 1520ID protects the weld cable while the six axes reposition the torch. KUKA designs for openness and flexibility. The six-axis KR AGILUS is built for high-speed small-part handling, and the seven-axis LBR iiwa adds a redundant joint for collaborative applications where the robot needs to work around obstacles. Yaskawa Motoman designs for application-specific solutions. The GP series covers standard six-axis needs, and the SDA series takes the concept further with fifteen axes across two arms for complex assembly tasks that no single-arm robot can handle.
What to Check on a Used Robot's Joints
Every axis on a robot is a joint, and every joint is a place where wear can hide. On a six-axis articulated robot, the wrist axes, A4, A5, and A6, take the most punishment. They move the most, they carry the weight of the end effector, and on robots retired from spot welding, they absorb the reaction forces from millions of weld cycles. Backlash measurements on the wrist axes are the single most valuable data point when evaluating a used robot. On a SCARA or Delta robot, the vertical axis and the rotating joints wear differently. These robots run at very high cycle rates with light payloads, and the reducers wear from frequency rather than force. A SCARA robot with a million cycles on the clock may have tight backlash numbers but still need the vertical axis checked for play that develops from constant up-and-down motion.
The application the robot came from determines where to look first. A spot welding robot will have the most wear in the wrist. A material handling robot will have more even wear across the primary axes. A cleanroom robot may have almost no mechanical wear at all but could have seals that dried out from age. The number of axes matters for inspection planning. A four-axis robot has four joints to check. A fifteen-axis dual-arm robot has fifteen. More axes mean more inspection points, and a buyer who allocates inspection time based on axis count is less likely to miss a worn joint.
This article was prepared by Tyche Robotic, a supplier of refurbished six-axis industrial robots serving integrators and resellers in Latin America, Southeast Asia, and Europe.


Contact Us
As a professional supplier of used industrial robots, Jiangmen Tyche Robotic Co., Ltd. is committed to providing customers with integrated solutions—from hardware selection and configuration to software programming, debugging, and after‑sales maintenance.
© 2025. All rights reserved.

Mr. Victor Ismael