
The Main Components of an Industrial Robot: What They Do and What to Check When Buying Used
A practical guide to the main components of an industrial robot, covering the controller, arm, end effector, drive system, and sensors. Includes what to inspect on each component when buying a used robot.
Tyche Robotic
6/4/20265 min read
An industrial robot is not one machine. It is five systems bolted together and told to work as one. The controller tells the arm where to move. The arm carries the end effector to the part. The drive system spins the motors that turn the joints. The sensors feed information back so the robot knows whether it actually got there. Each of these systems can work perfectly on its own and still fail as a group if they were not integrated correctly or if one of them has worn out in a way that does not show up until the cell is running production. For a used buyer, understanding the main components is not a textbook exercise. It is how you know where to look before you buy.
The Controller: The Brain of the Operation
The controller is where the program lives, where the I/O signals are processed, and where the motion commands are generated. Every robot brand has its own controller ecosystem, and the differences matter. FANUC's R-30iB is a closed, purpose-built system. It runs the same software the same way for years, and iRVision integrates directly without a separate PC. ABB's IRC5 and the newer OmniCore are built around motion control. TrueMove keeps the programmed path accurate regardless of speed. QuickMove optimizes acceleration to shave cycle time. KUKA's KRC4 and KRC5 run on a Windows-based open architecture. Integrators get flexibility, but the controller needs the same IT maintenance as any industrial PC. Yaskawa's YRC1000 is compact and handles multi-robot coordination natively, up to eight robots and seventy-two axes from a single box. On a used robot, the controller battery is the first thing to check. A dead battery wipes the mastering data, and re-mastering a six-axis arm adds commissioning time. The software licenses are the second thing. Welding packages, vision software, and handling tools are all licensed features. If they are not installed and transferable, the robot is just an arm that moves.
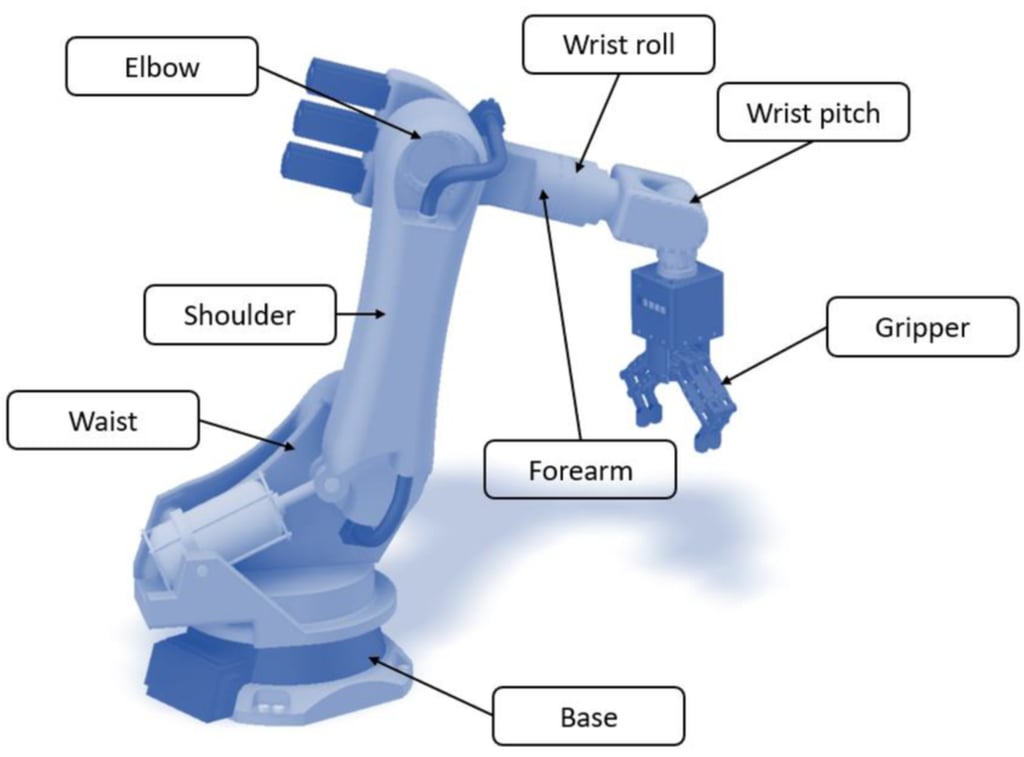
The Robot Arm: Bones, Joints, and Cables
The arm is what most people picture when they think of a robot. It is a chain of cast metal segments linked by rotating joints, starting at the base and ending at the wrist. Each joint contains a motor and a reducer that turns high-speed, low-torque motor rotation into the slower, high-torque motion that moves the arm. The reducers come in two main types. RV reducers handle high rigidity and high payload, which is why they sit in the primary axes that bear the brunt of the load. Harmonic reducers are lighter and more compact, common in wrist axes where space is tight and precision matters more than brute force. The arm also carries the dress pack, the bundle of cables and hoses that route power, air, data, and coolant to the end effector. Through-arm routing protects the cables inside the casting. External routing makes maintenance easier but leaves the cables exposed to spatter, snagging, and wear. On a used robot, wrist backlash is the first measurement to ask for. Worn reducers show up as play in the joints, and the wrist axes absorb the most punishment. The base mounting points should be checked for fatigue cracks, especially on robots retired from high-cycle spot welding. The dress pack should be inspected near the wrist for cracks, pinholes, and stiffness.
The End Effector: Where the Work Actually Happens
The end effector is the tool mounted to the robot wrist. It is the part that touches the product. Grippers are the most common type, mechanical jaws, vacuum cups, or magnetic heads that pick up parts and set them down. Process tools are the second category, weld torches, paint sprayers, deburring spindles, and dispensing nozzles that perform a specific manufacturing operation. Tool changers are the third piece of the puzzle. They let a single robot switch between different end effectors automatically, grabbing a gripper for one task and a weld gun for the next without manual intervention. On a secondhand robot, the end effector wears faster than any other component because it is the point of contact with the work. Mechanical grippers develop play in the finger joints. Vacuum cups harden, crack, or deform and lose suction. Weld torch cables get burned by spatter and stiffen from heat exposure. Tool changer locking mechanisms wear with every cycle, and a worn lock can drop a tool mid-cycle. Ask for the end effector's service history and check the wear items directly.
The Drive System: Motors, Reducers, and Power
The drive system is what makes the robot move. Servo motors are the standard in industrial robots because they offer precise position control with closed-loop feedback. A servo drive knows exactly where the motor shaft is at any moment and can correct for errors in real time. Stepper motors are cheaper but lack feedback, which makes them unsuitable for applications where losing position means scrapping a part. The motors are paired with reducers that trade speed for torque. Beyond the electromechanical drivetrain, some applications use hydraulic or pneumatic power. Hydraulic drives handle extreme payloads where electric motors would be impractically large. Pneumatic drives are fast and simple, common in gripper actuation and tool changing. On a used robot, the drive system leaves clues. Unusual motor noise during a test cycle can mean bearing wear. Hydraulic systems should be checked for leaks around fittings and seals. A loaded test report showing motor current draw and temperature under rated conditions tells you whether the drive system is working within its normal range or straining to keep up.
Sensors and Feedback: The Robot's Eyes and Nerves
Sensors are what separate a robot from a pre-programmed machine that blindly repeats the same motion regardless of what is happening around it. Position encoders are built into every joint and tell the controller exactly where each axis is at all times. Force and torque sensors measure what is happening at the point of contact, letting the robot feel whether a pin is sliding into a bore or whether a grinding wheel is pressing with the right pressure. Vision sensors give the robot the ability to find parts, check dimensions, and verify that a weld bead is the right size. Collision detection sensors protect the robot and the tooling by stopping motion the instant the arm hits something unexpected. On a used robot, sensors need their own inspection. Force sensors drift over time and need recalibration. Vision systems lose calibration and may need to be re-taught. Collision sensors should be tested to confirm they trigger at the correct threshold. A robot with non-functioning sensors is not a bargain. It is a blind machine that can only do half its job.
What This Means for Buying a Used Robot
Buying a used robot is not like buying a used car where you can kick the tires and take it for a test drive. It is a system-by-system evaluation. The controller needs its battery checked and its software licenses verified. The arm needs backlash measurements and a close look at the base mounting points and the dress pack. The end effector needs its wear items inspected and its service history reviewed. The drive system needs a loaded test report showing motor current and temperature under real conditions. The sensors need calibration records and functional tests. Each of these five systems can be in a different state of wear, and the robot is only as reliable as the weakest one. A loaded test report and a video of the specific robot running a test cycle are the minimum documentation to ask for before writing a check. Anything less is guessing.
This article was prepared by Tyche Robotic, a supplier of refurbished six-axis industrial robots serving integrators and resellers in Latin America, Southeast Asia, and Europe.


Contact Us
As a professional supplier of used industrial robots, Jiangmen Tyche Robotic Co., Ltd. is committed to providing customers with integrated solutions—from hardware selection and configuration to software programming, debugging, and after‑sales maintenance.
© 2025. All rights reserved.

Mr. Victor Ismael