
How Robotic Vision Systems Give Industrial Robots Better Eyes
A practical guide to robotic vision systems. Covers 2D and 3D vision technology, how vision unlocks adaptive automation, costs, Big Four vision platforms, AI trends, and what to check when buying a used vision-guided robot.
Tyche Robotic
5/19/20267 min read

A blind robot is a machine that can only do what it has been told, in the exact way it has been told, and only if everything around it stays exactly where it was when the programmer hit save. That works for some jobs. It does not work for others. The global market for robotic vision systems sat at around four and a half billion dollars in 2025 and is projected to climb past thirteen billion by 2035. That is not a niche growing slowly. That is a core technology becoming standard equipment. Vision gives a robot the ability to see a part, find its position, check its quality, and adjust what it does next, all without a human operator touching a teach pendant. And it is not just about 2D snapshots anymore. 3D vision patents jumped over forty percent in 2025 alone. AI is teaching robots to recognize objects they were never explicitly programmed to find. For anyone buying a used industrial robot, understanding how vision works, what it costs, and what to check on a used vision system is no longer optional knowledge. It is part of the purchase.
How Robotic Vision Systems Work
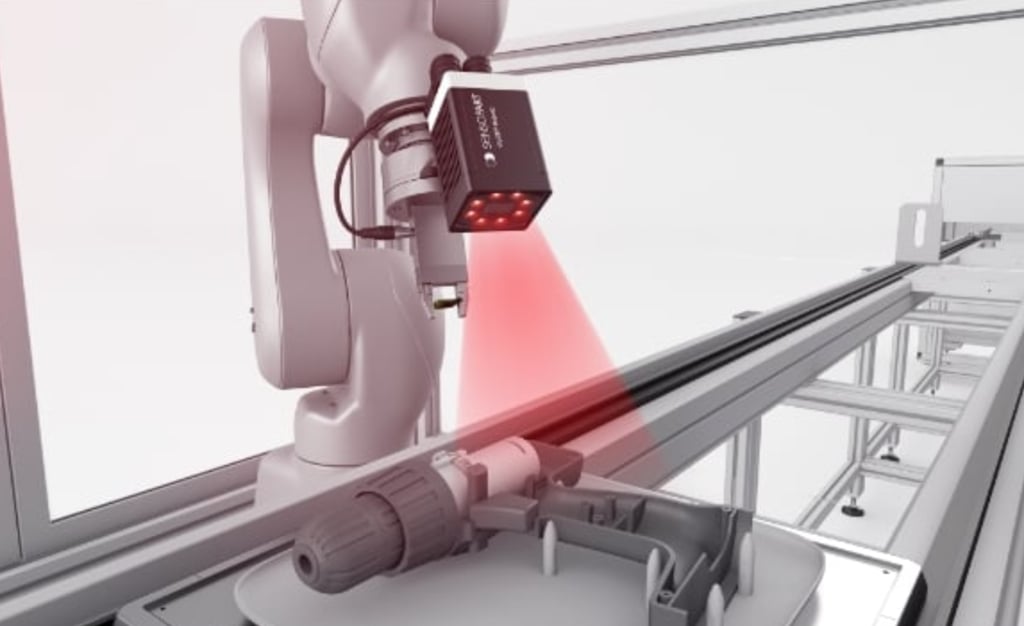
A robotic vision system does four things in sequence. A camera or sensor captures an image of the workspace. Software processes that image to find the part, identify its orientation, and measure whatever features matter for the job. That information gets converted into coordinates the robot can use. The robot controller adjusts the programmed path or the pick approach based on what the vision system reported. The camera can be mounted on the robot arm itself, which gives a close-up view and moves with the robot, or it can be fixed above the workstation, which gives a consistent wide-angle view but requires a clear line of sight. Both have their place, and the choice usually comes down to whether the robot needs to see the same area from different angles or needs a stable view of a moving conveyor.
Not all vision is the same. 2D vision gives the robot a flat image. It can find the X and Y position of a part on a conveyor and maybe its rotation. It is fast, the cameras are inexpensive, and for simple pick-and-place from a flat surface, it is often all you need. 3D vision adds depth information. The robot gets the full six degrees of freedom of the part, meaning it can pick a randomly oriented casting out of a bin, or follow a weld seam that curves in three dimensions. The three main 3D technologies each solve a different problem. Structured light projects a known pattern onto the part and measures how the pattern deforms. The accuracy is high, so it tends to show up in precision assembly and quality inspection. Time-of-flight sensors measure how long it takes light to bounce back from the part. They are fast and work well in logistics and high-speed sorting where the belt never stops. Laser triangulation scans a line across the part and builds a profile from the reflection. It handles shiny metal surfaces and mixed materials better than the other two, which is why it often shows up in welding and foundry applications.
What Robotic Vision Can Do That Blind Robots Cannot
Robotic vision unlocks four capabilities that turn a robot from a dumb repeater into something closer to an adaptive worker. Part location and guidance is the most common use case. Parts do not always arrive in the exact same position. A vision system lets the robot find the part wherever it landed, which means the manufacturer can skip the expensive precision feeders and jigs that a blind robot demands. Weld seam tracking and adaptive welding is the second capability. In arc welding, heat distorts the workpiece. A seam that was straight when the robot was programmed may have shifted by the time the torch gets to the end. A vision system tracking the seam in real time can adjust the torch path on the fly, compensating for thermal distortion and fixture variation. Quality inspection and sorting is the third capability. A vision-equipped robot can measure part dimensions, check for surface defects, and verify assembly completeness faster and more consistently than human inspectors. And it documents every inspection, which matters in regulated industries. Assembly and precision operations is the fourth capability. Vision guides a robot during pin insertion, adhesive bead placement, and screw driving, where a fraction of a millimeter of misalignment means a scrapped part.
The Cost Side of Vision: What to Expect
A basic 2D vision system can cost a few thousand dollars. A full AI-driven 3D system with high-resolution sensors can push past fifty thousand dollars. The spread is wide because the cost depends on four things. The first is how complex the scene is. A part sitting alone on a white conveyor belt is an easy problem. A bin full of randomly tangled parts under variable lighting is a hard one, and the hardware and software costs scale accordingly. The second is the sensor. A structured light camera or a high-speed laser profiler costs more than a basic industrial 2D camera, and the price climbs with resolution and scan speed. The third is the processing hardware and software. AI-driven 3D recognition often demands a dedicated industrial PC or edge computing device, plus the software license, which can be a recurring cost or a one-time purchase depending on the vendor. The fourth is integration. A vision system is not a plug-and-play component on most robots. It takes engineering time to calibrate, test, and tune the system for the specific part and lighting conditions in a given cell.
What matters for the return on investment is not just the vision system's price tag. It is what the vision system lets you stop buying. A precision mechanical fixture designed to present a part in an exact position can cost more than the vision system that makes the fixture unnecessary. And when the product changes, the vision system gets reprogrammed in software, while the fixture has to be remachined. The money saved on fixturing, changeover time, and reduced scrap often pays for the vision system within the first year of production.
How the Big Four Handle Vision
Each of the major robot brands has its own approach to vision, and the differences matter when you are buying a used system that already has vision hardware and software installed. FANUC's iRVision is a 2D and 3D vision platform that runs directly on the R-30iB controller. There is no separate PC to manage, and the integration with FANUC's own motion control is seamless. The 3D variant can handle bin picking and random part location, and the system is widely supported because FANUC has been shipping it for years. KUKA's VisionTech platform runs on the KRC4 and KRC5 controllers and leans heavily into 3D and AI-powered recognition. It is designed to handle unstructured environments where parts are not jigged and the robot needs to adapt. ABB integrates vision, force control, and motion on the OmniCore controller. The system is built to work with ABB's SafeMove safety functions, which means vision-guided robots can operate in collaborative settings without additional safety hardware. Yaskawa's MotoSight runs on the YRC1000 controller and covers 2D and 3D applications with a particular strength in weld seam tracking. For a used buyer, the brand of vision system usually follows the brand of the robot, because each manufacturer's vision software is tied to its own controller architecture.
What the Latest Trends Mean for Buyers
Four trends are reshaping what vision-guided robots can do, and they matter for anyone buying equipment today that will still be running years from now. AI-driven object recognition is moving from "trained on specific parts" to "trained on categories of objects." A robot that could only pick the exact model of casting it was programmed for can now recognize any casting that looks roughly similar, without reprogramming. Some systems now accept natural language commands, where an operator describes the task in plain words and the robot generates its own motion plan. This dramatically lowers the programming barrier and makes vision-guided robots accessible to shops without dedicated automation engineers. 3D vision is getting cheaper and faster. The jump in patent filings is a leading indicator of where the hardware is heading. Sensors that cost twenty thousand dollars five years ago now have competitors at half that price with better resolution. Edge AI is another shift. Instead of sending images to a separate PC for processing, the vision algorithms run on embedded hardware inside the camera or directly on the robot controller. This simplifies the system, reduces cost, and eliminates a failure point. The software side is growing even faster than the hardware. The market for vision-guided robot software is expanding at nearly twenty percent per year, which means the algorithms that look impressive today will look average in three years. The practical takeaway for a used buyer is that the vision hardware on a robot may still be perfectly functional, but the software version matters more than ever. A used robot with an older vision software release may need a paid upgrade to support newer 3D sensors or AI features.
What to Know When Buying a Used Vision-Guided Robot
A used robot with a vision system needs two inspections: the robot itself, and the vision hardware and software layered on top. The robot side follows the same rules as any other used machine. Check backlash, controller battery condition, and mechanical wear. The vision side has its own checklist. Start with the camera and lens. Look for scratches on the lens housing, check that the focus and aperture settings are intact, and confirm the camera still produces a clear image. A camera that spent years near a welding cell may have spatter damage on the lens or a haze from fume deposition that degrades image quality. Check the cables. Vision cameras connect to the controller or a PC through industrial Ethernet, USB, or Camera Link cables. Flexing, heat, and chemical exposure degrade these over time. A damaged cable can cause intermittent image dropouts that are hard to diagnose. Ask for the sensor calibration report. 3D cameras and laser profilers drift over time and need recalibration roughly every six months. A calibration report tells you whether the sensor was maintained or neglected. Verify the vision software license. iRVision, MotoSight, KUKA.VisionTech, and ABB's vision functions are all licensed features. Confirm that the license is installed, active, and transferable. Also check the software version. If the robot is running an older version of the vision software, ask whether an upgrade path exists and what it costs. The hardware may be fine, but an unsupported software version can limit what the robot can do with newer sensors or AI capabilities. If you are buying a robot with a 2D system and think you may need 3D later, evaluate whether the controller has the processing power and the hardware interfaces to support a 3D upgrade. Some older controllers simply cannot handle the data throughput of a modern high-resolution 3D camera, and retrofitting a new controller is a far larger expense than buying a robot that was already 3D-capable.
This article was prepared by Tyche Robotic, a supplier of refurbished six-axis industrial robots serving integrators and resellers in Latin America, Southeast Asia, and Europe.


Contact Us
As a professional supplier of used industrial robots, Jiangmen Tyche Robotic Co., Ltd. is committed to providing customers with integrated solutions—from hardware selection and configuration to software programming, debugging, and after‑sales maintenance.
© 2025. All rights reserved.

Mr. Victor Ismael